Healthy Leaves
A smart planter. Get your plants healthy by tracking and adjusting their environment based on a community database.


In the context of our Capstone Project at Concordia University, we were tasked with building a device that would have software and hardware complexities.
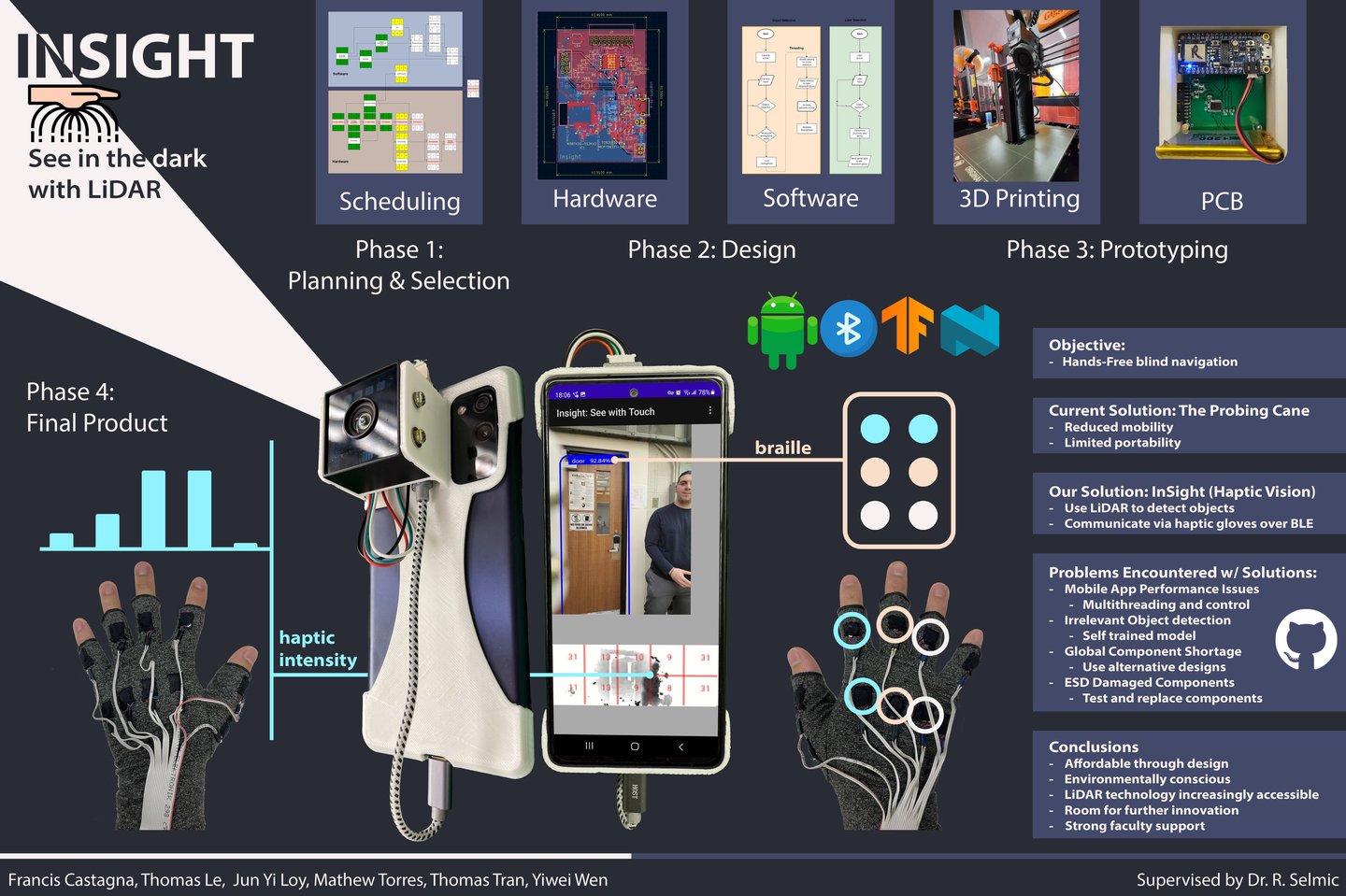
Visually impaired individuals have many alternatives to their disposal to help them navigate the physical world without the use of their sight. Some of them are a mobility cane, a guide dog, a helper person, a voice overlayed GPS, scoundscape. Each of these solutions have their pros and cons. For example, the probing cane is simple, reliable and cheap. It has an easy learning curve. It can easily detect difficult obstacles such as sidewalks, stairs and engraved signs. However it also comes with its weaknesses, such as restraining the user’s mobility because the sweep time from side to side takes time, the user can’t go fast. Plus, the cane occupies an entire arm. The probing cane has a very limited range (1-2 meters) and generally is unportable due to its non-retractable length. In the case where the probing cane is retractable, it greatly affects its lifespan because of the added fragility. Even without the non-retractability feature, the probing cane has a limited lifespan due to the nature of its usage where it is in constant collision with other objects. The arm motion required to use the probing cane can be very straining for the user's arm and the upper back, making this tool inaccessible to many users with more than one disability. Finally, the use of the probing cane can be conspicuous and noisy, putting the entire room’s attention on its user.
Our system would be able to solve all of these issues without adding any weaknesses of its own. This system consists of a device attached to the user’s belt and gloves equipped with 10 individual haptic motors each. The device attached to the user’s belt is equipped with a lidar sensor capable of detecting physical objects at a proximity in front of the user. This information is then transferred to the haptic gloves and can then be interpreted by the user to navigate knowing whether an object is in front of him/her such as a probing cane would. The device attached to the user’s belt is also equipped with a camera and can perform object detection on doors and stairs, these edge case objects are also communicated to the user though the haptic gloves using braille language.
With this device, compared to the probing cane, mobility is restored because the user has increased foresight range and can therefore move at a faster speed. Plus, both arms are now free to hold or move freely because the gloves aren’t intrusive in the movement. Indeed, no physical strain is exerted on the user’s body because the device is worn like a normal belt and the gloves are worn like normal gloves. The user gets information using their touch sense with the haptic motors as they would usually do when reading text in braille. The system’s lifespan is very variable due to the stability of the software and the quality of the build of the hardware. However, it is safe to say that with proper product development and testing, the lifespan of this device would easily compete against the probing cane’s. The device attached to the user’s belt is a normal Android smartphone making the device very affordable, as the gloves and the lidar device are the only components to be bought. Finally, this design is very modest, further pushing our goal of integrating visually impaired people into our community. The belt worn device is barely noticeable and the gloves can be worn as a piece of fashion as gloves are an already popular accessory.